|
NEW - Prototype of 1/4 Scale FS Dynamic Bed
|
|
|
Over the years I had a design in mind for a full motion FS dynamic bed. I wanted to minimize the parts necessary. Traditional dynamic beds use 6 hydraulic cylinders. I had a concept that on paper seemed like I could build a system that reduced it to 2 actuators of some sort.
Basically a frame within a frame design. As shown below I built a control panel using the MobiFlight interface. With this interface it was possible to integrate the outputs for bank and pitch from the flight simulator to control the dynamic bed without a lot of complicated programming.
Since I already had three 12v linear actuators and a 16 relay board to interface with a 2560 Ardunio board I started with the linear actuators. Programming and wiring was straight forward, however the actuators were too slow. For the design it would also require more height from the floor to the base of the cockpit.
|
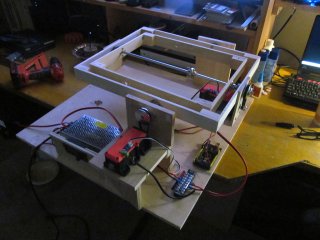
The second option for the prototype were servos. I was able to find some on Amazon with a high torque capacity. For a full scale version servos may be cost prohibitive but for they prototype they would at least confirm that my design would work. I used two servos. One for the pitch and one for the bank.
Here are some videos of the work so far. The servos are a bit choppy. The are designed to work at a recommended 18 volts. I ran them at 12v power supply with at reduction drive of timing pulleys. For a full scale version I switch to a gear drive off of either servos or hydraulic drives.
|
|
|
|
Website including images displayed on this website are the property of John R. Havrilla, Chapel Hill, NC and are protected under United States Copyright Law. Any use without the express authorization of John R Havrilla is expressly forbidden. Violators will be prosecuted to the full extend of the law.
|
|